
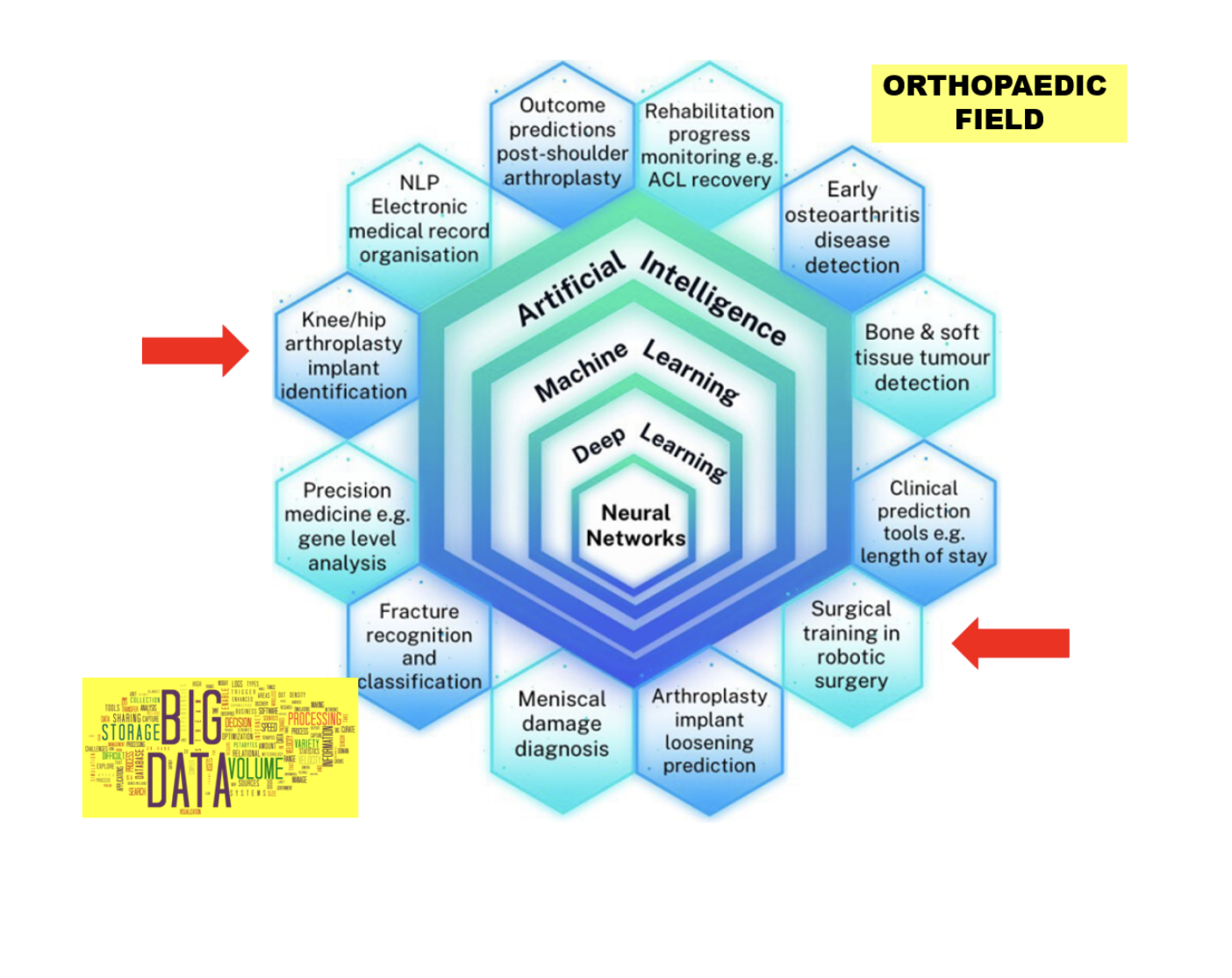
Oggi, tutti parlano dell’Intelligenza Artificiale (AI), di robotica chirurgica, di machine learning, big data e di intelligenza generativa. Circondano il nostro lavoro, in qualche modo le utilizziamo, quotidianamente, ma non in sala operatoria.
Nonostante tutti gli sforzi progettuali, scientifici, divulgativi e organizzativi dell’associazione CAOS Int. (Computer Aided Orthopaedic Surgery) che, dagli anni 90’ promuove le nuove e diverse tecnologie chirugiche, legate agli strumenti dell’intelligenza artificiale, ancora un gruppo sparuto di chirurghi, nel mondo, le utilizza. Si stima un utilizzo del 7%, circa, di strumentazione “robotica”, per gli interventi chirurgici. Infatti, il rapido progresso delle moderne capacità computerizzate non è stato accompagnato da un progresso analogo nell’impostazione della sala operatoria e nelle tecniche operatorie. Il principale progresso nella chirurgia ortopedica negli ultimi cinquant’anni è stata l’introduzione dell’imaging fluoroscopico intraoperatorio e dell’endoscopia articolare, mentre, le tecniche chirurgiche di impianto protesico articolare e di osteosintesi, sono rimaste per lo più invariate.
Strano, perchè le procedure ortopediche che riguardano le ossa, un tessuto non deformabile, sono adatte alla guida computerizzata basata su immagini, ottenute in fase preoperatoria e intraoperatoria, ed ai gesti di un robot, attivo, manuale o passivo.
La chirurgia assistita da computer è progredita dai sistemi di prima generazione, degli anni ’90, agli attuali sistemi di terza generazione che, con il braccio meccanico robotico, consentono ai chirurghi di impiantare una protesi di ginocchio o anca con elevata precisione. Tuttavia, la maggior parte dei chirurghi ortopedici evita di utilizzare tecniche chirurgiche robotiche o computerizzate.
Perché? Quali le cause?
I fattori che costituiscono la risposta a questa domanda possono essere raggruppati in tre categorie: tecnologici, finanziari e umani.
Fattori tecnologici.
Ci sono due partner principali nell’implementazione della tecnologia chirurgica assistita da computer: il mondo accademico e l’industria. Mondo accademico: la scienza dell’ingegneria informatica dovrebbe fondersi con le scienze ortopediche. Una comprensione della logica (algoritmi) dietro ogni procedura è obbligatoria per sviluppare nuove soluzioni. Le soluzioni possono essere classificate come abilitanti o migliorative. Mentre gli abilitatori si riferiscono a procedure che non sono possibili senza la chirurgia assistita dal computer (ad esempio, l’introduzione di un nuovo concetto o capacità, piuttosto che una traduzione di una tecnica attuale in chirurgia assistita dal computer), i miglioratori forniscono, principalmente, una precisione migliorata e non la creazione di un concetto, completamente, nuovo. Ad esempio, l’inserimento di viti per la fissazione di una frattura viene, spesso, eseguito con l’uso di viti cannulate e fili guida. Questi fili possono essere inseriti con maggiore precisione con l’uso di un sistema computerizzato, poiché la guida è una caratteristica intrinseca della tecnologia e non c’è bisogno di un filo guida.
Industria: non c’è dubbio che l’industria contribuisca notevolmente al campo della chirurgia robotica assistita da computer. Tuttavia, parte dello sviluppo di sofisticati strumenti robotici da parte di aziende commerciali è guidata dal desiderio di realizzare un profitto. Il risultato finale dello sviluppo è un prodotto che può essere venduto agli ospedali.
Esistono due gruppi di prodotti principali: sistemi chiusi e sistemi aperti. I sistemi chiusi sono composti sia da hardware che da software progettati per una sola procedura, mentre i “sistemi aperti” sono progettati in modo tale che hardware comune possa essere dotato di software diversi, ciascuno dei quali è adatto a una diversa procedura chirurgica. Inoltre, ci sono alcune aziende di tecnologia informatica che introducono “sistemi aperti” universali con collegamento alle aziende di impianti ortopedici. Questo collegamento potrebbe portare a una seconda fase, in cui il contratto tra le aziende lo trasformerà in un “sistema chiuso”.
Ovviamente, le aziende commerciali accolgono con favore i sistemi chiusi, che gli ospedali non possono permettersi. Il futuro risiede nei sistemi aperti, aperti sia a procedure diverse che agli aggiornamenti software. La sfida è creare una tecnologia che diventerà obbligatoria in sala operatoria, simile a quella degli attuali strumenti di base, come l’intensificatore di brillanza nella sala operatoria ortopedica. Questi sistemi richiederanno un investimento finanziario preliminare in hardware, ma consentiranno future aggiunte di software e aggiornamenti di sistema. Non è chiaro se il prodotto finale sarà lo strumento computerizzato, robotico, le parti monouso o entrambi. Chiunque sia coinvolto nello sviluppo di tali sistemi deve tenere a mente che un’idea brillante senza un prodotto finale commercializzabile non verrà approvata dalle aziende commerciali.
Fattori finanziari
L’acquisto di un sistema completo computerizzato e robotico può comportare un investimento considerevole da parte dell’ospedale e devono essere presi in considerazione la manutenzione e l’aggiornamento continui. Esistono tre principali fonti di finanziamento che possono investire nella sponsorizzazione di questa tecnologia: sovvenzioni per la ricerca, budget ospedalieri e pagamenti dei pazienti. Le sovvenzioni per la ricerca, sia accademiche che provenienti da investimenti di ricerca e sviluppo del settore,
vengono solitamente utilizzate nelle fasi iniziali dell’integrazione della chirurgia assistita dal computer. Tuttavia, un’integrazione e un’implementazione diffuse e continue non sono fattibili solo con sovvenzioni per la ricerca. Pertanto, l’onere del finanziamento di questa nuova tecnologia sarà sostenuto dal sistema sanitario, dai pazienti stessi o da una combinazione dei due.
Per il finanziamento del sistema sanitario e dell’ospedale, la chirurgia assistita dal computer dovrà dimostrare non solo un migliore posizionamento, allineamento e longevità, ma anche risparmi finanziari. Questi risparmi possono derivare da ricoveri ospedalieri più brevi grazie all’uso di interventi chirurgici minimamente invasivi, risparmi sulle attrezzature convenzionali (ad esempio, meno cestelli di strumenti, necessari per una procedura di sostituzione protesica guidata), meno complicazioni e minori spese legali. Inoltre, maggiori entrate possono essere generate attraverso lo sviluppo di un modello di riferimento all’ospedale che offre interventi chirurgici assistiti da queste tecnologie.
Ovviamente, in un sistema privato puro, saranno i pazienti a sostenere l’onere finanziario o l’assicurazione di riferimento. I costi possono essere sostenuti dai pazienti direttamente, tramite prezzi specifici delle procedure computerizzate, o indirettamente, tramite la ridefinizione dei prezzi assicurativi delle procedure.
Ma, l’ostacolo principale è costituito dai Fattori umani
Impatto psicologico: la maggior parte dei chirurghi ortopedici ha ricevuto una formazione classica con poca o nessuna esposizione alle tecniche computerizzate. Un chirurgo ortopedico senior che ha fiducia nelle sue tecniche operative e nei risultati tende a essere più esitante nell’accettare una nuova tecnica per sostituire quella precedente di successo. Inoltre, un chirurgo senior ha fiducia nelle proprie capacità e non accetterà facilmente l’aiuto di un computer nell’esecuzione dell’intervento chirurgico.
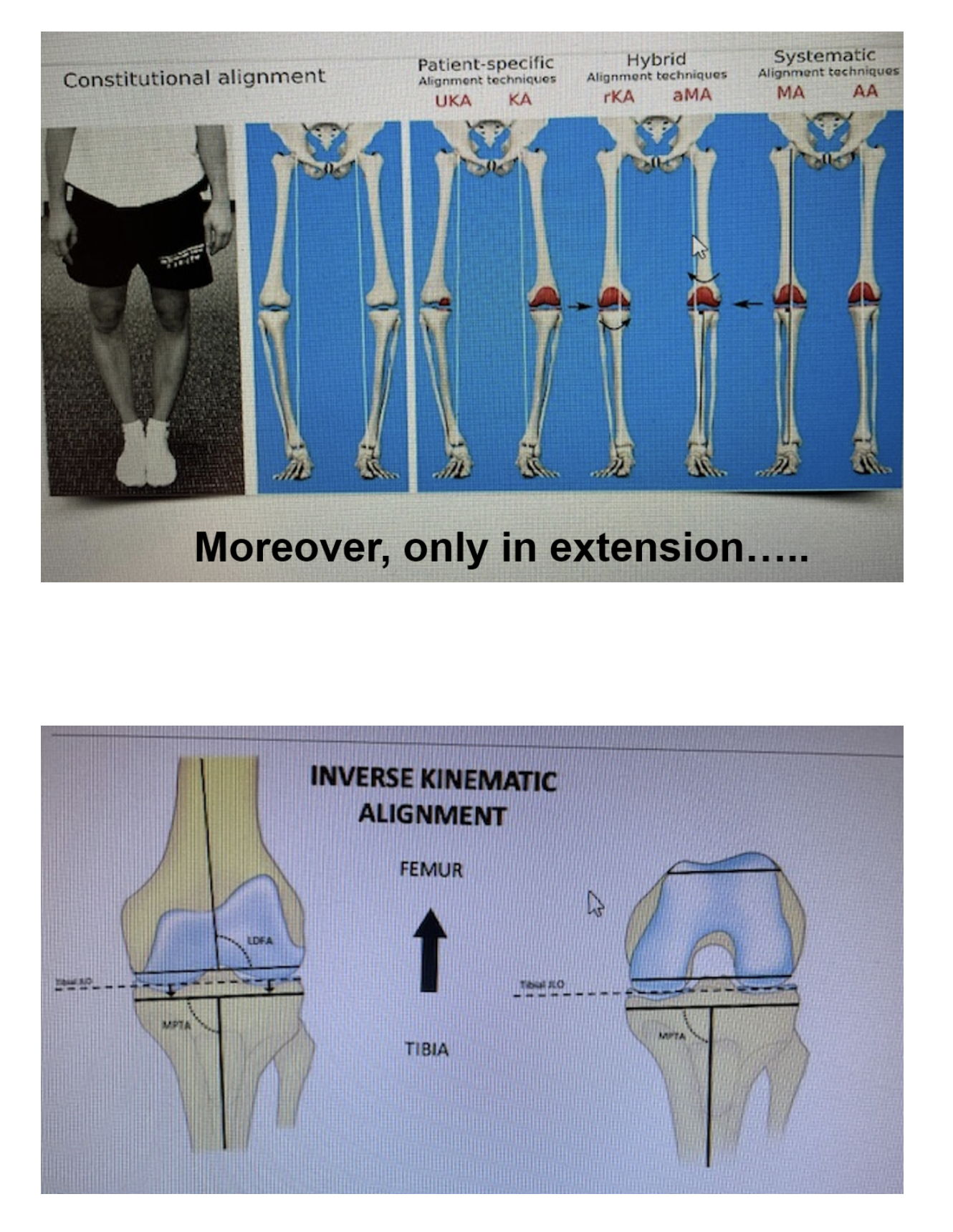
Anche perché, per l’impianto di una protesi totale di ginocchio, tutta questa tecnologia, non è fondamentale, aiuta ma non è indispensabile. Infatti, negli ultimi 40 anni, siamo stati inondati da pubblicazioni scientifiche, riguardanti la correzione della deformità artrosica, con la protesi, per raggiungere l’asse anatomico migliore, dell’arto inferiore. Asse meccanico, cinematico, inverso cinematico, morfologico, ecc.
Non solo, anche da una serie infinita di designs protesici: CR, PS, CCK, Endomodel, Third Condyle, Medial and Lateral Pivot, Ultracongruent Insert, ecc. ecc.
Per non parlare delle vie d’accesso, mininvasive, a volte più piccole del diametro della protesi.
Bene, con gli strumentari tradizionali, se si seguono le indicazioni basilari, riportate in ogni manualetto di accompagnamento, TUTTE FUNZIONANO, più o meno, anche a lungo termine.
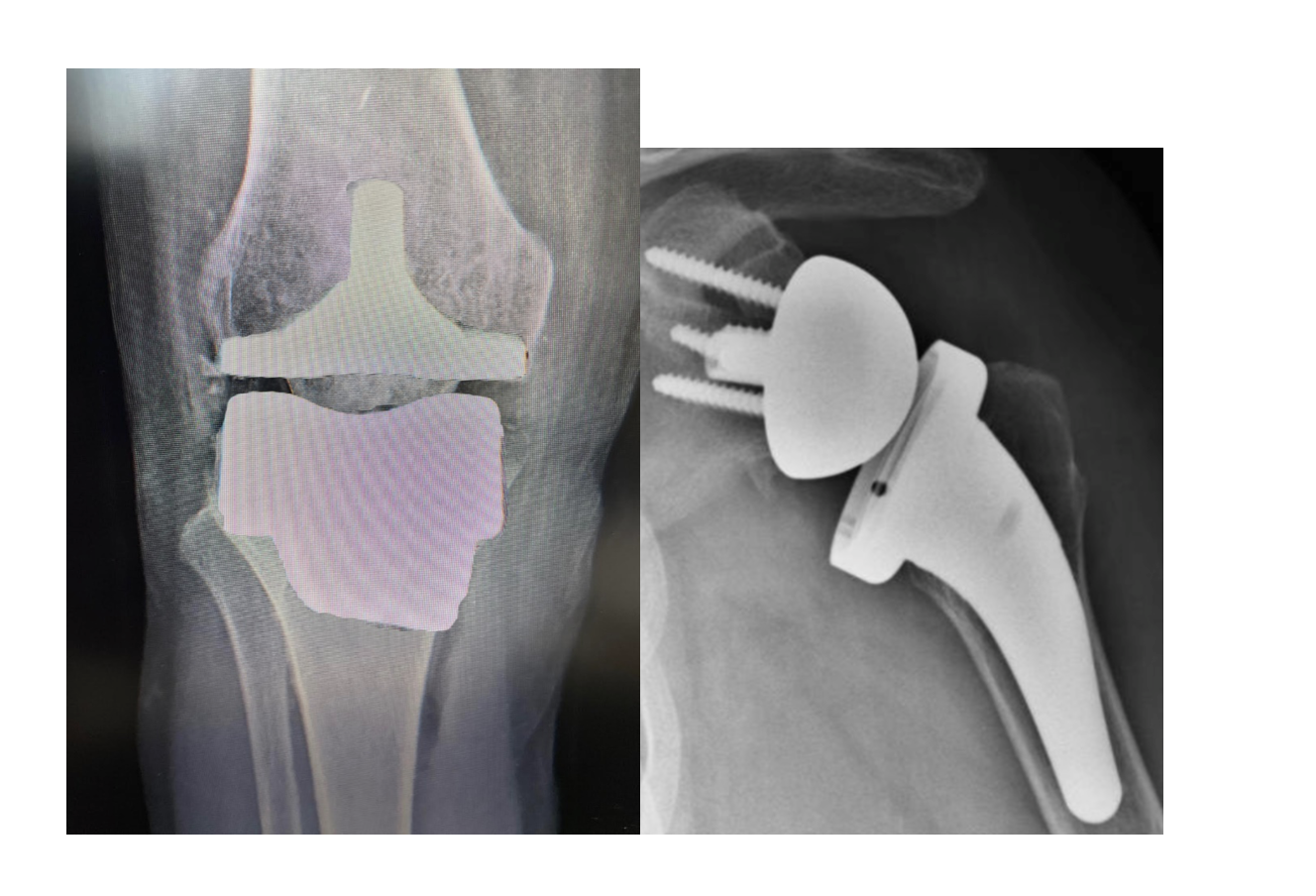
Come mai? Semplice: se si sacrifica il pivot centrale dei legamenti crociati, si ottiene un’articolazione instabile che perde la sua normale cinematica: il lift-off del comparto laterale con il suo roll back, il cosiddetto meccanismo “screw home” della flesso estensione, con associato la caduta posteriore del femore, per la sublussazione anteriore della tibia che porta all’usura del bordo posteriore dell’inserto protesico. In pratica, così, si ottiene un ginocchio artificiale che si muove secondo il disegno ed il vincolo della protesi.

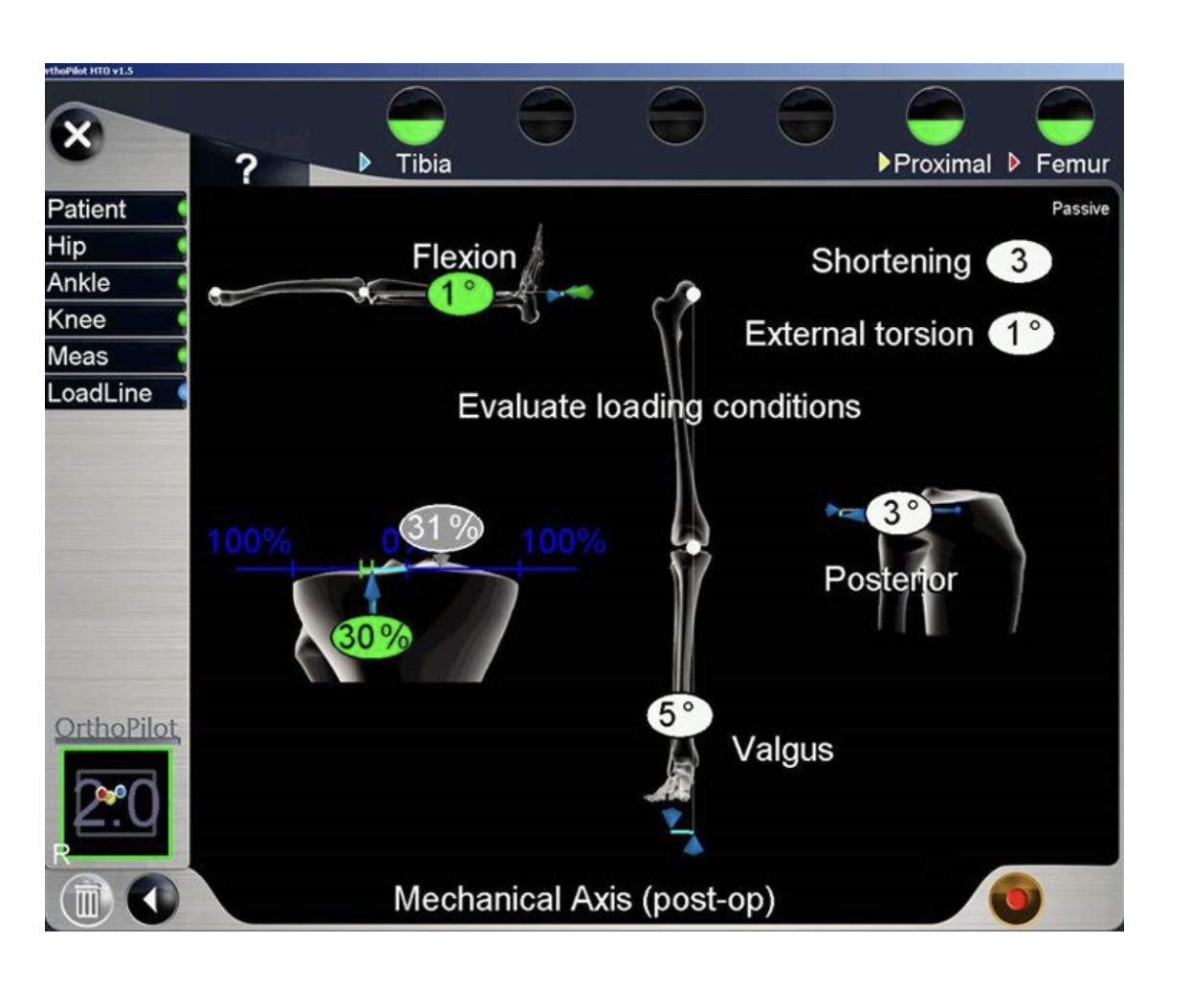
La foto, qui sotto riportata, è provocatoria, ridicola, inverosimile, mostra una protesi di ginocchio montata al contrario, con la componente tibiale al posto di quella femorale e viceversa. E’ un’immagine generata con l’Intelligenza artificiale. Ma, non è così assurda, se pensiamo che, nella spalla, esiste una protesi inversa, e funziona.Mentre, se si utilizzano le protesi compartimentali parziali e si salvano i legamenti crociati (e si risparmia osso), si conserva la normale biomeccanica del ginocchio.Certo, queste protesi sono più difficili da impiantare, per il bilancio legamentoso, non facile da ottenere nel movimento articolare completo. Infatti, lo spazio articolare, tra il femore e la tibia, cambia nella flesso-estensione, nel comparto mediale e laterale, nel ginocchio varo o valgo. Ed è importante conoscerlo, in termini numerici, il più possibile, per equilibrarlo. Ovviamente, le tecnologie computerizzate-robotiche, giocano un ruolo importante.
Per evitare di incorrere in tensioni legamentose sui crociati, nella flesso estensione, che portano ad uno sbilancio articolare.
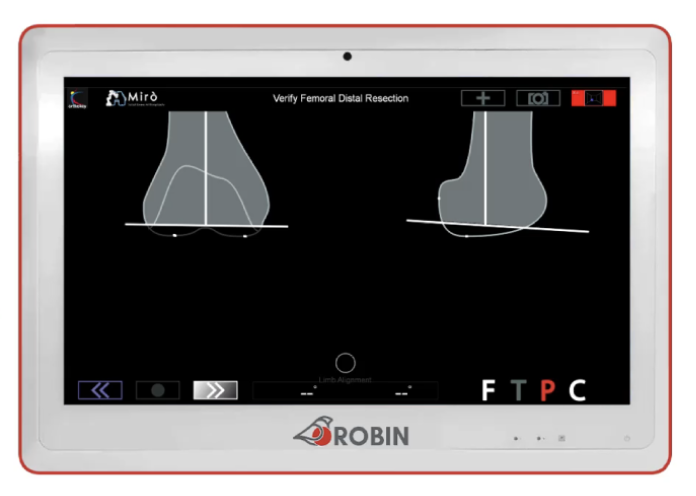
A maggior ragione, se si associano, diversi interventi, per la correzione dell’asse patologico del ginocchio e della relativa artrosi. Qui, il raggiungimento del perfetto asse dell’arto e del bilancio legamentoso articolare, senza computer assistenza, diventa un esercizio per chirurghi, veramente, esperti. Invece, i sistemi software della robotica, forniscono dati precisi in sala operatoria e permettono di conoscere, con un numero, ogni passaggio delle procedure chirurgiche.
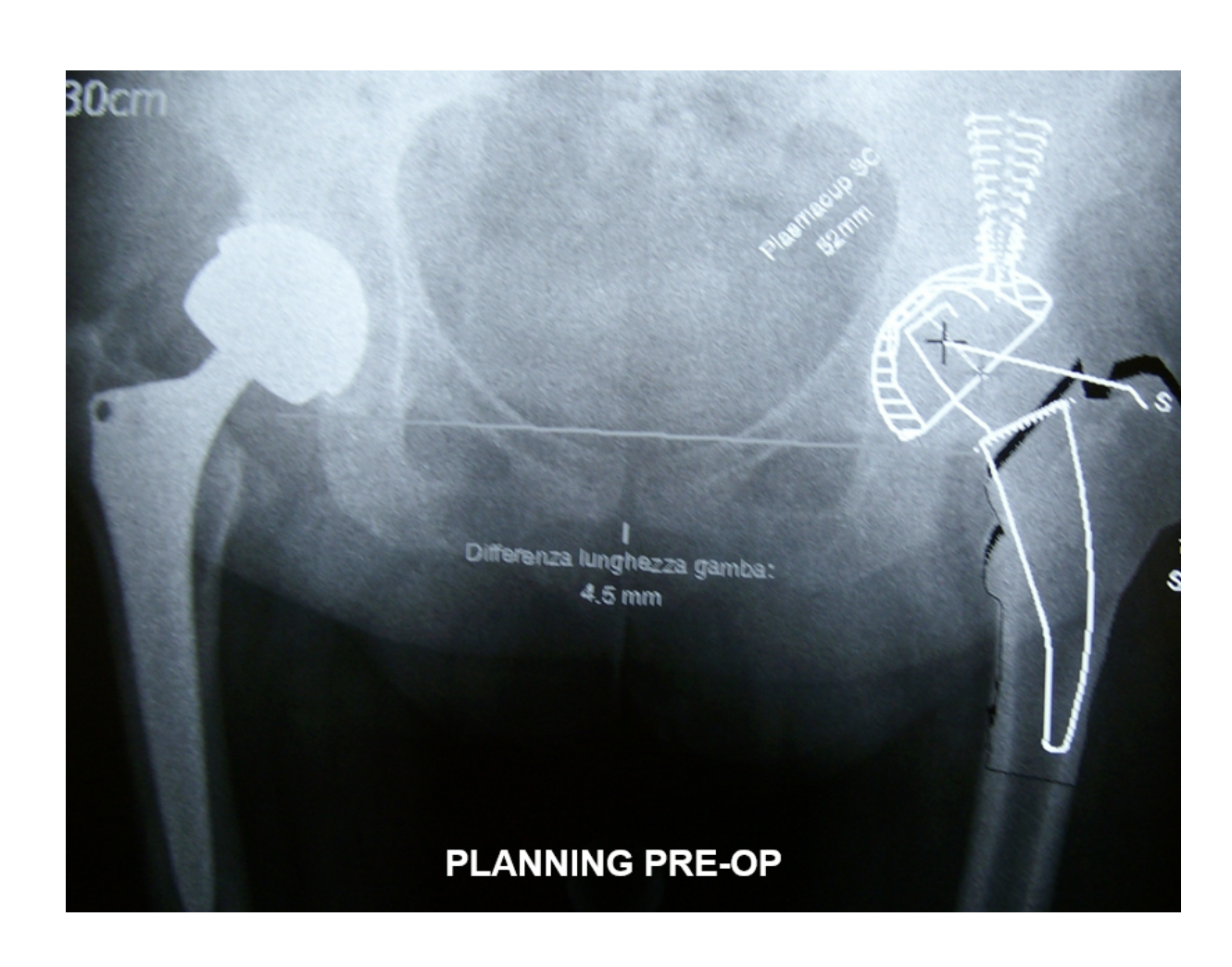
La stessa cosa per la protesi d’anca. Per l’impianto primario in un’anca artrosica, un chirurgo di media esperienza, non ha bisogno di tutta questa tecnologia ingombrante. Basta una pianificazione tradizionale.
Diverso il discorso nella displasia congenita o nelle deformità gravi articolari, dove è importante ripristinare il centro di rotazione più favorevole alla funzione articolare, correggere la dismetria degli arti e, in qualche caso, accorciare il femore (shortening tecnique).
Ma, per usare al meglio questi strumenti computer e robotici, occorre utilizzarli tutti i giorni. Magari non per tutti gli interventi, ma con costanza e applicazione.
“Facilità d’uso”: operare con l’ausilio della robotica chirurgica assistita da computer comporta un coordinamento specifico. Il compito di spostare una traiettoria sullo schermo posizionando uno strumento guida nel campo operatorio può sembrare semplice per un ragazzino abituato a giocare ai videogiochi, ma può essere difficile per una persona più anziana. Queste capacità possono essere migliorate dalla pratica e da speciali ausili di formazione. Anche le conoscenze informatiche di base sono necessarie per gestire questi sistemi, un prerequisito che viene soddisfatto dal crescente numero di personal computer nella popolazione generale.
Medicina basata sulle prove: dati scientifici oggettivi dovrebbero essere implementati. Gli studi, oggi disponibili in Pubmed, hanno mostrato sia una migliore accuratezza che una ripetibilità, per l’impianto di protesi di ginocchio e d’anca ma, sono ancora pochi (solo dei più esperti), i risultati clinici, a distanza di tempo, superiori alla tradizione. Mentre, la varianza dei risultati operativi, rispetto all’obiettivo mirato, diminuisce quando viene utilizzata la chirurgia assistita dal computer, con risultati più pronunciati, nei chirurghi meno esperti. La chirurgia assistita dal computer aiuta a ridurre il numero di risultati anomali, il che significa che meno pazienti saranno esposti a un mal posizionamento di una protesi. Questi dati (misurazioni radiografiche dei risultati, allineamento e posizionamento), anche quando pubblicati, non sono stati sufficienti a convincere i chirurghi ortopedici a utilizzare le nuove tecnologie.
Curva di apprendimento: inerente all’implementazione di una nuova tecnica è la curva di apprendimento. Nella “robotica”, la curva di apprendimento riguarda tutti i membri del team chirurgico. Riguarda i chirurghi che eseguono l’operazione, gli infermieri che devono gestire i nuovi strumenti, gli anestesisti che devono adattare il tempo di anestesia al tempo previsto per l’operazione e i tecnici di radiologia che a volte devono utilizzare sistemi di navigazione basati sulla fluoroscopia. L’intero team deve essere consapevole che c’è un ‘‘nuovo partner’’ in sala operatoria e, a volte, anche un tecnico informatico dovrà far parte del
team. La curva di apprendimento dovrebbe essere accettata come parte dell’integrazione e non come una scusa per ritardare l’implementazione.
Fattori ergonomici: la maggior parte delle sale operatorie non è stata progettata tenendo conto della nuova tecnologia in termini di dimensioni o posizionamento dei sistemi robotici, dallo schermo del computer, dei cavi di collegamento e braccia meccaniche articolate. Le macchine occupano spazio.
Conclusione
La chirurgia assistita da computer e robot ha il potenziale per rivoluzionare la chirurgia ortopedica proprio come la fluoroscopia e l’artroscopia fecero qualche decennio fa.
Attualmente, il suo uso popolare è impedito da un corto circuito: una mancanza di dati clinici sufficienti, da un lato, con una riluttanza a utilizzare la tecnologia e, quindi, a fornire questi dati, dall’altro.
La sfida, per il futuro, sarà quella di superare gli ostacoli umani, tecnici e finanziari. Una volta superati questi ostacoli, crediamo che la chirurgia “robotica”, assistita dall’intelligenza artificiale generativa, stabilirà un nuovo standard di cura.
Fino a quel momento, ci saranno coloro che saranno disposti a guidare la rivoluzione e a pagare il prezzo del progresso e coloro che saranno riluttanti a prendere parte a questa impresa.